 资讯
资讯大自然神奇的力量,带(dài)给机(jī)器人专家很多研发灵感。
比如植物的(de)生长。
 portant;" />
portant;" />
当植物每天接受长(zhǎng)时间(jiān)的(de)太阳(yáng)光照时,通过细胞(bāo)分裂(有丝分裂)和(hé)幼苗(miáo)上胚轴或生长点(diǎn)的扩展,植物会迅(xùn)速长出叶(yè)子和茎,这将支(zhī)持未(wèi)来花朵(duǒ)或果实(shí)的生(shēng)长(zhǎng)。
植物的生(shēng)长方式给麻(má)省理(lǐ)工(gōng)学院的工程师带来了灵感(gǎn),于是他(tā)们开发出一种灵活机器人。
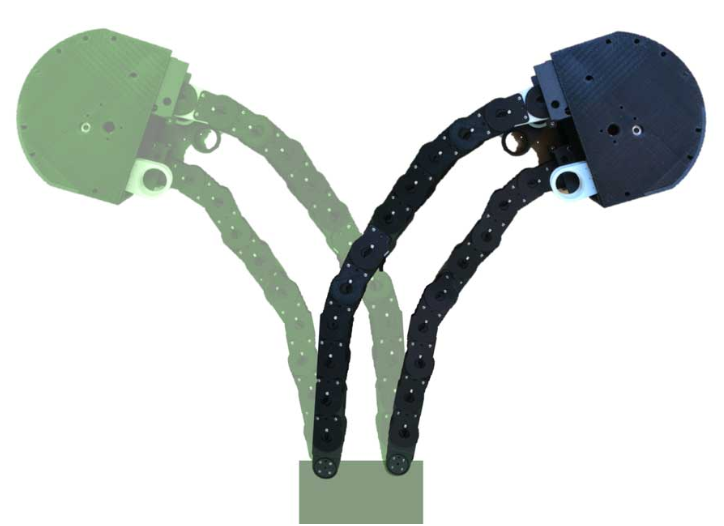
灵活机器人(rén)采用链状附(fù)件(jiàn)设(shè)计,使其延伸得足够灵活,因此能够在任何必要的配(pèi)置中扭转和转动。
同时(shí),它(tā)又具有足够的(de)刚(gāng)性以支(zhī)撑重负载,或施加扭(niǔ)矩(jǔ)以在狭(xiá)窄的空间中组装零件。
灵活机(jī)器(qì)人由一个(gè)“生长(zhǎng)点”或变速箱组成,该变速箱将松动的互锁块链拉(lā)入(rù)盒子(zǐ),将链条单元锁定在一起(qǐ)。
任务(wù)开始(shǐ)时,灵活机器人会以刚性附(fù)件的形式将链(liàn)条逐个送(sòng)出。
任务完成(chéng)后,机器(qì)人可以收回(huí)附件(jiàn),并以不同的(de)长(zhǎng)度(dù)和形状(zhuàng)再(zài)次将其伸出以(yǐ)迎(yíng)接下一个任务。
这项研究部分由日本(běn)轴(zhóu)承制造商NSK Ltd资助。
填补狭窄空间机器(qì)人灵活作业的(de)空白
在相比宽(kuān)阔开放的工厂中,移动机器人(rén)实现自主导航毫(háo)无困难,但是对于在狭小的空间里,或者是(shì)杂乱(luàn)的货架后(hòu)面(miàn),甚至是拧开汽车发动机的油盖,目(mù)前的机(jī)械手可能无法实(shí)现(xiàn)。
灵活(huó)机(jī)器人(rén)的(de)研发也许就可以填补这方面的空白。
福特基金会工程学教授Asada表示,“机器人(rén)的实现(xiàn)与(yǔ)实际工厂完全不同,它是在某种抽(chōu)象水平上展现出相同的(de)功能。”
在实验中(zhōng),机(jī)器人被编程(chéng)后(hòu),它会绕着障碍物从(cóng)其基座(zuò)延伸或在扩(kuò)展时转过身。
也就是(shì)说,它已经(jīng)足够灵活(huó)了(le)。
据研究(jiū)人员表(biǎo)示,如果(guǒ)将抓爪连接到机器(qì)人的生(shēng)长尖端或变速箱(xiāng)上,则灵活机器人(rén)可以生长得足够长,以在狭(xiá)窄的空(kōng)间中蜿蜒,然后施加足够的扭矩来松开螺栓或拧(nǐng)松盖(gài)子。
团队的研究员Emily Kamienski认为,自(zì)动维护(hù)是机器人(rén)可以完成的任务的(de)一个很(hěn)好的(de)例子。她说:“引(yǐn)擎盖下的空(kōng)间(jiān)相(xiàng)对开(kāi)阔,但最后一点是必须在(zài)发动(dòng)机缸体周围导航或到达(dá)机油滤清器的地(dì)方,这(zhè)是固定臂无法触及的地方(fāng)。而这个机器人可以做类似的(de)事情。”
关键是解(jiě)决(jué)“最后一脚”
“最(zuì)后一脚(jiǎo)”是指机器(qì)人任务或探(tàn)索(suǒ)性任务(wù)的最后(hòu)一步。
机(jī)器人一般都花费大(dà)部分时间穿越开放空间,但(dàn)其任务(wù)的最后一步可能涉及在更紧凑、更(gèng)复杂的空间中,因(yīn)此(cǐ)它需(xū)要进行更灵活的导(dǎo)航以(yǐ)完(wán)成任务(wù)。
目前(qián),该团(tuán)队已经设计出(chū)各种概念和原型来解决“最(zuì)后一脚”的问(wèn)题,包括由柔软的气球(qiú)状材料制成的机器人,这种材料可以像藤蔓一样生长,毫无压力地(dì)通过狭窄(zhǎi)的缝隙挤(jǐ)压(yā)。
但是,遗憾的(de)是,一旦机器(qì)人蠕动到(dào)目的(de)地,这种柔软的(de)可扩展机器人还不够坚固,无法支撑执行器所(suǒ)需(xū)的(de)末端执行器,例如(rú)抓手、相机和其他(tā)传感(gǎn)器(qì)。
福特(tè)基金会工程学教授Asada说:“我们的解决方案实际上不是软的,而是巧(qiǎo)妙地使用刚性材(cái)料(liào)。”
研究(jiū)人(rén)员设(shè)计了一个变速箱来代表(biǎo)机器人(rén)的“生长尖端”,就像植物的芽一样(yàng),随着更多的营(yíng)养素流向该部(bù)位,尖端将产生更坚硬的茎。
在盒子(zǐ)中,它们装有齿轮和电动机系统,该系(xì)统用于拉起(qǐ)流化的材料,在这种情况下,弯曲(qǔ)的3D打印塑料单元序列(liè)相互连锁,类似于自行车(chē)链(liàn)条(tiáo)。
当链条(tiáo)被送(sòng)入(rù)盒子时,它绕绞盘(pán)转动(dòng),绞车(chē)通(tōng)过第(dì)二组电机进行编程。第二组电(diàn)动机被编程为将链(liàn)条中(zhōng)的某些(xiē)单元锁定到(dào)其相(xiàng)邻单元,再将其从盒(hé)子中送出时形成(chéng)刚性附件。
研究人员通过对(duì)机器人进行编程,将某些单元锁定(dìng)在一起,而其他(tā)单元则保持解锁状态,使其(qí)形成特定的形状,或(huò)在某些方(fāng)向(xiàng)“生长”。
 portant;" />
portant;" />
资料来源:麻省理工学院(yuàn)
当链条被(bèi)锁定且状态是刚性的时候,其(qí)强度(dù)足以支撑1磅重(不到1斤)。
柔性(xìng)制造或再添(tiān)新(xīn)成(chéng)员
柔性制(zhì)造作为一种具有旺盛(shèng)需求和强(qiáng)大生命力的(de)生产模式。
机(jī)器人(rén)在汽(qì)车和(hé)3C电子(zǐ)制造行业的应用(yòng)占比(bǐ)超过(guò)65%,柔(róu)性抓(zhuā)取、灵活(huó)作业甚至能自主(zhǔ)避障的机器人都是精密智能仓库亟(jí)需的(de)设备。
在新一代的信息(xī)技(jì)术与制造(zào)业深度(dù)融合的(de)发展(zhǎn)主线下,如果(guǒ)将灵活机器人用于生产制(zhì)造系(xì)统中,以其柔性化的生产能力,必将带来颠覆性的(de)工厂革命。












中(zhōng)心")
